
推薦新聞
聯系方式
全國服務熱線:
咨詢熱線:400 605 0755 傳真:0755-28456835 聯系人:李升 郵箱: jnhj008@sina.com 地址:深圳市龍崗區平湖街道禾花社區華南大道一號華南 國際印刷紙品包裝物流區(一期)P13 棟 109號
焊接機器人的示教盒作用
發布時間:2019-06-06 點擊量:8200
示教盒是人對焊接機器人示教的人機交互接口,主要的作用是對焊接機械臂的動作進行調試記錄,目前人對機器人示教有3種方式:
1) 手把手示教
又稱全程示教,即由人握住焊接機器人的機械臂末端,帶動機器人按實際任務操作一遍。在此過程中,焊接機器人控制器的計算機逐點記下各關節的位置和姿態值,而不作坐標轉換,再現時,再逐點取出,這種示教方式需要很大的計算機內存、而且由于機構的阻力,示教精度不可能很高。
2) 示教盒示教
即由人通過示教盒操縱焊接機器人進行示教,這是最常用的機器人示教方式,目前焊接機器人都采用這種方式。
3) 離線編程示教
即無需人操作焊接機器人進行現場示教,而可根據圖樣,在計算機上進行編程,然后輸給機器人控制器。它具有不占機器人工時,便于優化和更為安全的優點,所以是今后發展的方向。
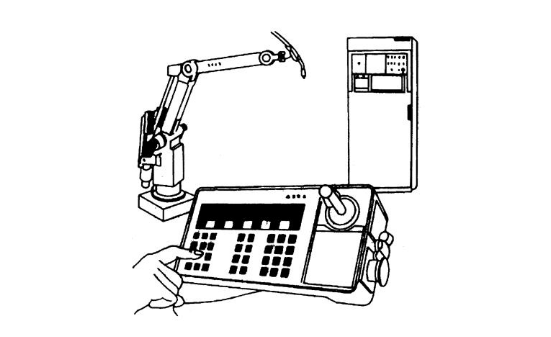
上圖為ESAB焊接機器人的示教盒,它通過電纜與控制箱連接,人可以手持示教盒在工件附近最直觀的位置進行示教。示教盒本身是一臺專用計算機,它不斷掃描盒上的功能和數字鍵、操縱桿,并把信息和命令送給控制器。各廠家的機器人示教盒都不相同,但其追求的目標都是為方便操作者。
示教盒上的按鍵主要有3類:
1) 示教功能鍵 如示教/再現、存入刪除修改、檢查、回零、直線插補、圓弧插補等,為示教編程用。
2) 運動功能鍵 如刀向動、y 向動、z 向動、正/反向動、 1~6 關節轉動等,為操縱機器人示教用。
3) 參數設定鍵 如各軸速度設定、焊接參數設定、擺動參數設定等。
1) 手把手示教
又稱全程示教,即由人握住焊接機器人的機械臂末端,帶動機器人按實際任務操作一遍。在此過程中,焊接機器人控制器的計算機逐點記下各關節的位置和姿態值,而不作坐標轉換,再現時,再逐點取出,這種示教方式需要很大的計算機內存、而且由于機構的阻力,示教精度不可能很高。
2) 示教盒示教
即由人通過示教盒操縱焊接機器人進行示教,這是最常用的機器人示教方式,目前焊接機器人都采用這種方式。
3) 離線編程示教
即無需人操作焊接機器人進行現場示教,而可根據圖樣,在計算機上進行編程,然后輸給機器人控制器。它具有不占機器人工時,便于優化和更為安全的優點,所以是今后發展的方向。
上圖為ESAB焊接機器人的示教盒,它通過電纜與控制箱連接,人可以手持示教盒在工件附近最直觀的位置進行示教。示教盒本身是一臺專用計算機,它不斷掃描盒上的功能和數字鍵、操縱桿,并把信息和命令送給控制器。各廠家的機器人示教盒都不相同,但其追求的目標都是為方便操作者。
示教盒上的按鍵主要有3類:
1) 示教功能鍵 如示教/再現、存入刪除修改、檢查、回零、直線插補、圓弧插補等,為示教編程用。
2) 運動功能鍵 如刀向動、y 向動、z 向動、正/反向動、 1~6 關節轉動等,為操縱機器人示教用。
3) 參數設定鍵 如各軸速度設定、焊接參數設定、擺動參數設定等。
上一條:焊接機器人的發展進程 | 下一條:焊接機器人的控制器作用



 400 605 0755
400 605 0755

